Etienne,
Je me suis remis au projet hier soir, du coup une question :
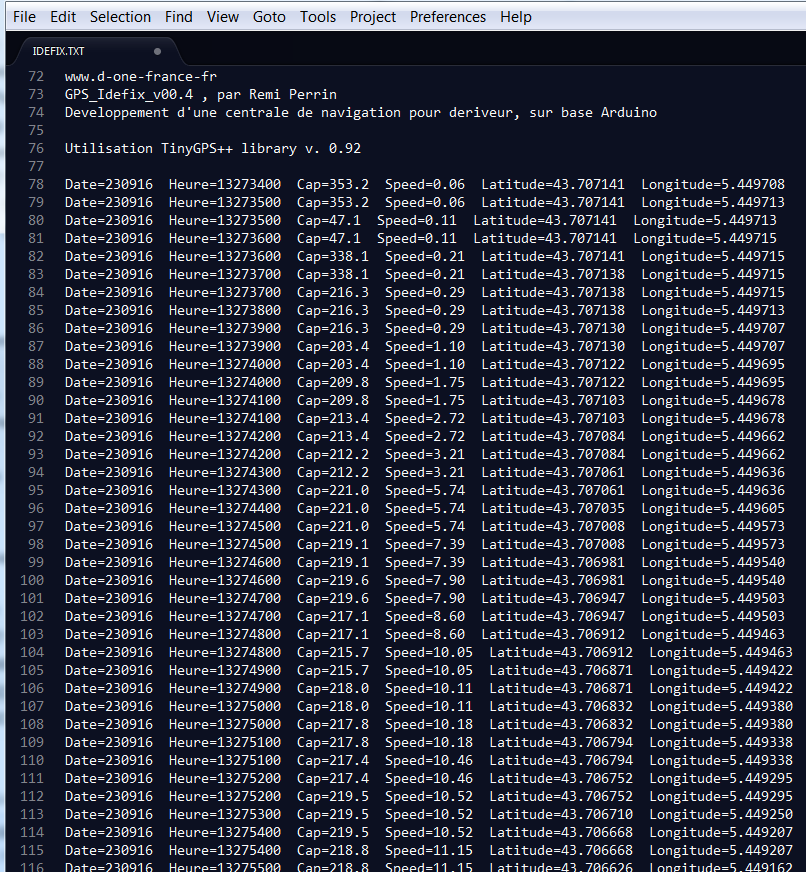
Pour ce qui est des données de vitesse, vous les avez calculée à partir des données de position où en extraction direct de l'output du GPS ?
Pour le moment je travail sur ces dernières avec les NMEA string émises par mon
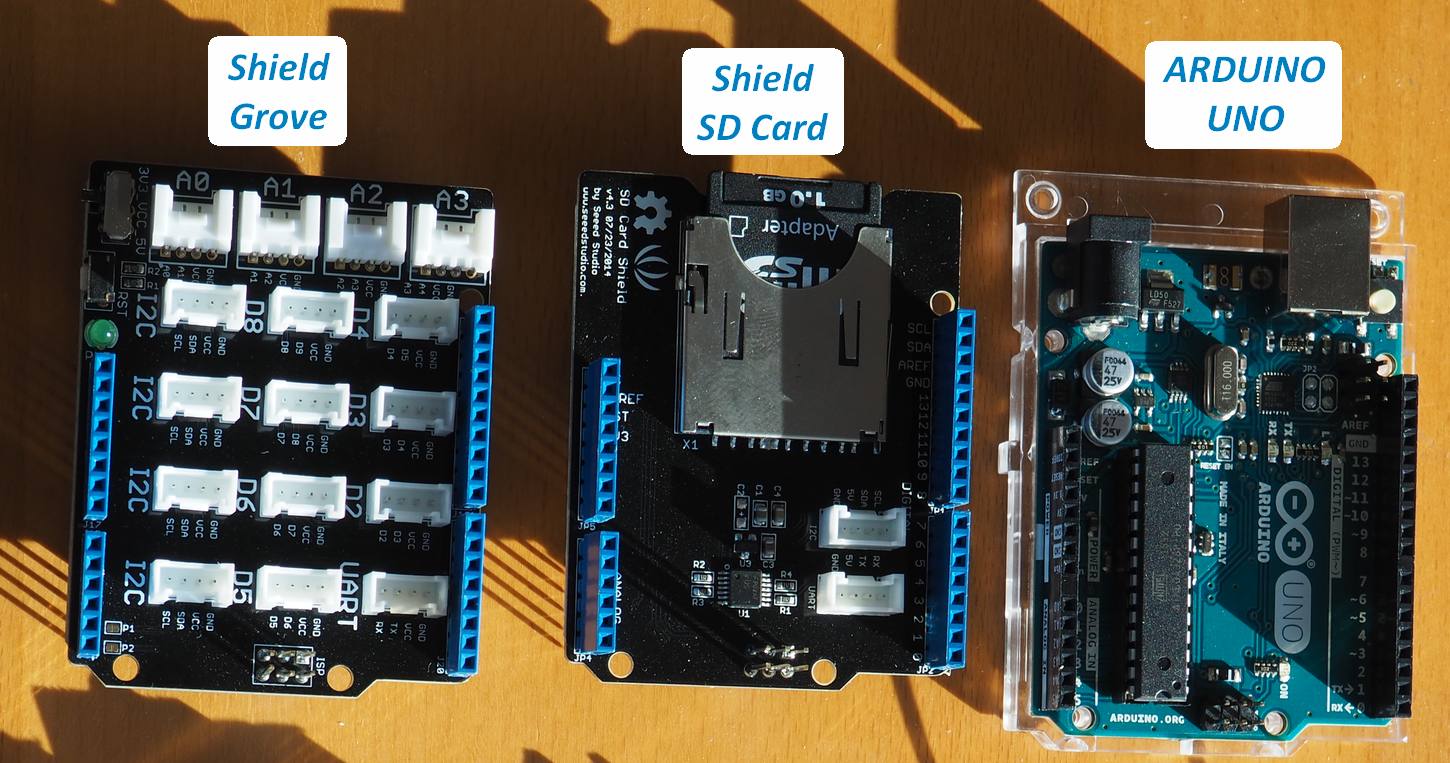
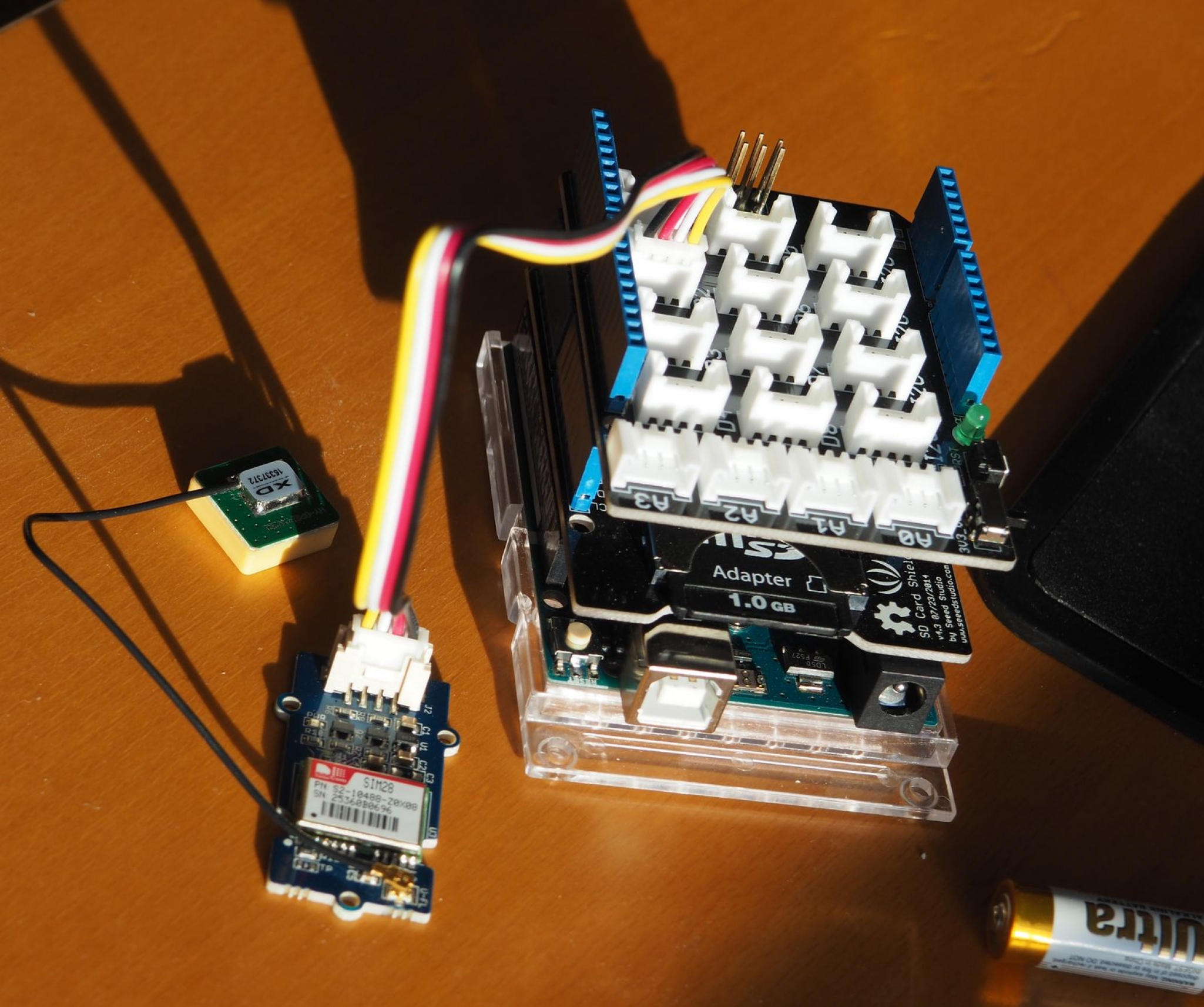
Grove GPS
$GPRMC,hhmmss,A,xxxx.xx,N,yyyyy.yy,E,vvv.v,ccc.c,ddmmyy,,,A*66
où :
> hhmmss : est le time stamp UTC
> A, ou V : désigne la validité du fix GPS
> xxxx.xx,N : Latitude
> yyyyy.yy,E : Longitude
> vvv.v : la vitesse en kts
> ccc.c : le cap (course made good)
> ddmmyy : la date du jour
> ,,,A, variation magnétique, Indicateur de mode
> *66, le checksum
Ces indications ne me paraissent pas mal du tout
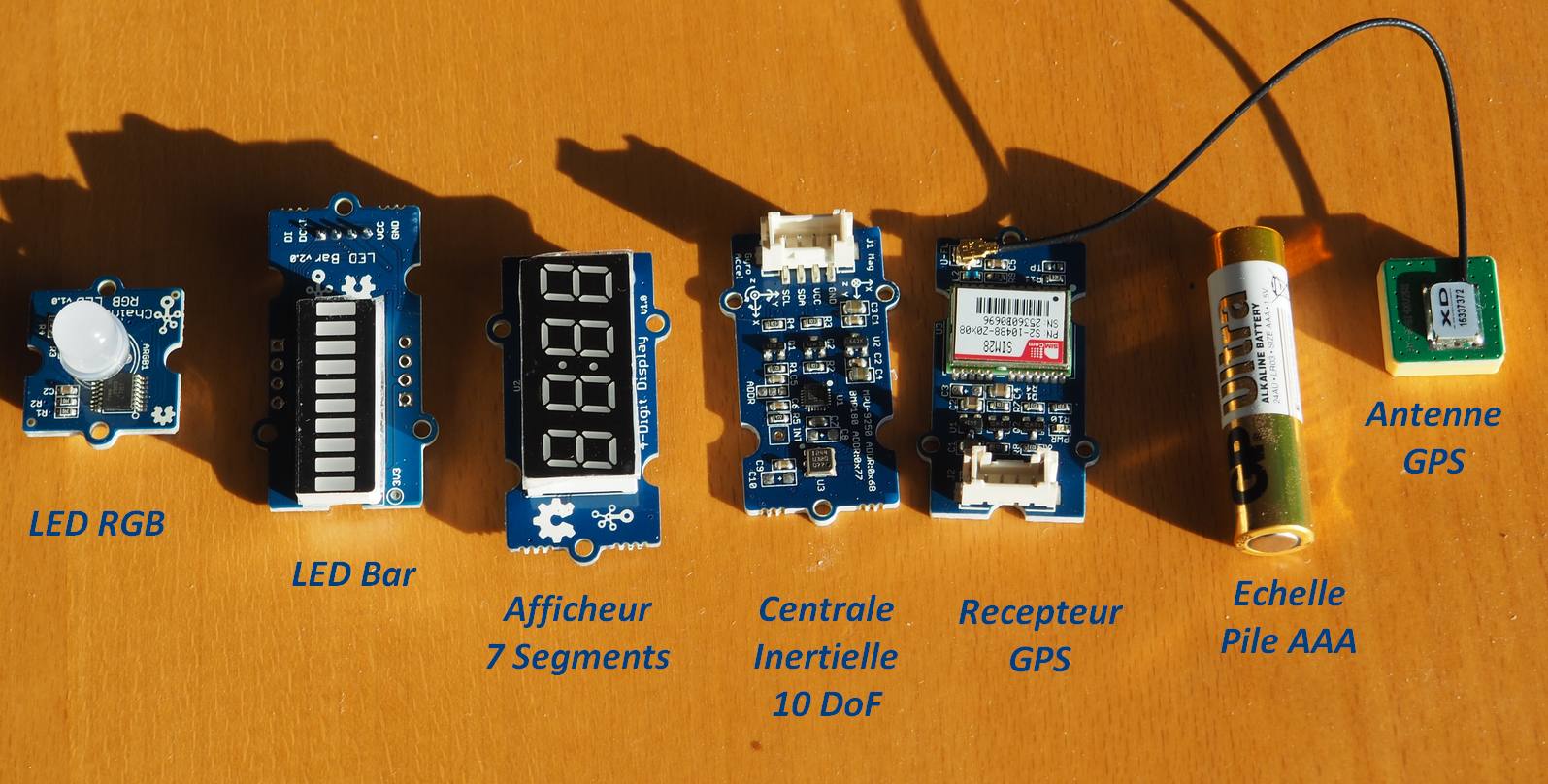
Je suis en train de coupler çà avec une centrale inertielle 10DOF pour pouvoir crosschecker les data, et ensuite faire les calcul de VMG.
3-axes gyroscopique, 3-axes accelerometre, 3-axes magnetometre et le Digital Motion Processor(DMP)
http://wiki.seeedstudio.com/wiki/Grove_-_IMU_10DOF
Je vais tester çà demain à vélo, dans notre gamme de vitesse pour voir si la précision, variabilité sera exploitable telle quelle, ou si il faut filtrer/lisser les output.
")
 Caractéristiques du Bateau
Caractéristiques du Bateau